前回は、GR-ROSEを使用して、AD変換、DA変換を行いたいと思いました。前回の内容は下記のサイトを参考にしてください。
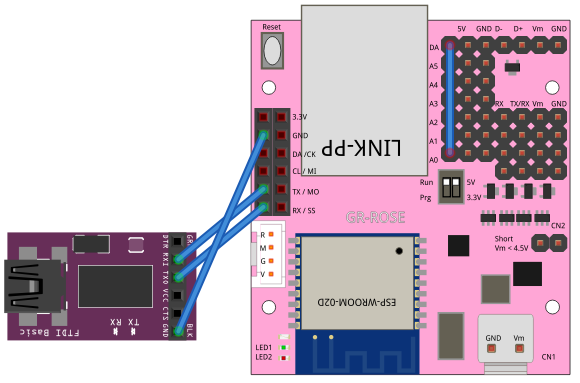
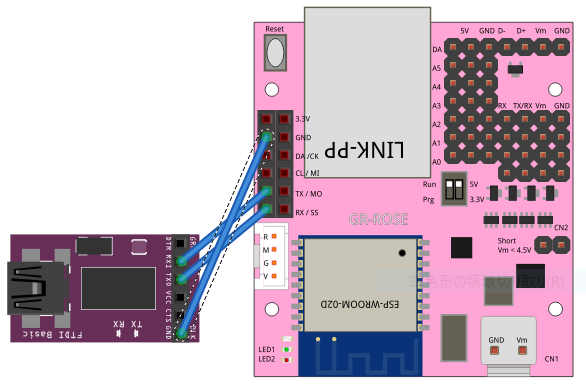
今回はGR-ROSEを使用して、ソフトウェア割り込みを行いたいと思います。使用するハードウェアはGR-ROSEです。下記のような構成になります。
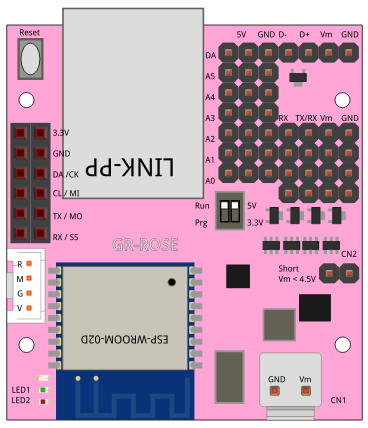
機能の概要は下記のようになります。
- 1secタイマを作成します。
- 1secタイマの割り込みが発生すると、ソフトウェア割り込み1を発生させます。
- ソフトウェア割り込み1が発生すると、LED1の点灯状態を反転させます。その後、ソフトウェア割り込み2を発生させます。
- ソフトウェア割り込み2が発生すると、LED2の点灯消灯を反転させます。
これらの処理を行うことで、LED1とLED2を1秒間隔で点滅させます。それでは、ソフトウェア割り込みを使用した機能を構築したいと思います。今回も開発環境はe2studioを使用します。
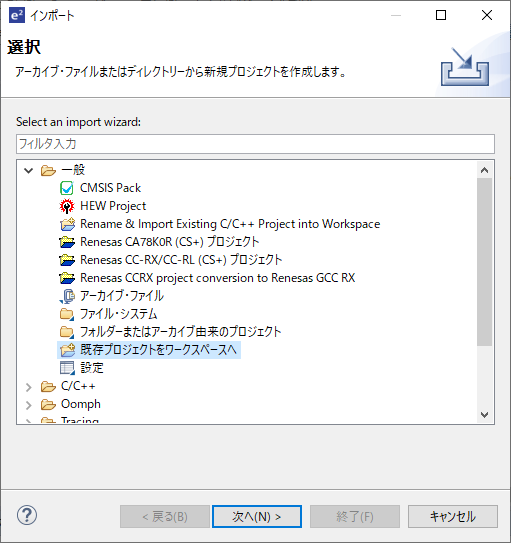
まずは、新規プロジェクトを作成します。新規プロジェクトの作成方法は、下記のページを参考にしてください。ターゲット・デバイスは、「R5F565NEHDFP」なので、「R5F565NEHxFP」に設定してください。
プロジェクト・エクスプローラーに新規プロジェクトが追加されました。中央には、スマート・コンフィグレータが開かれると思います。まずはクロックの設定を行っていきます。クロックの設定は、下記のサイトを参考にしてください。
クロックの設定が完了したら、コンポーネントを追加していきます。まずは、PORTの設定をします。PORTの設定は、記のページを参考にして下さい。