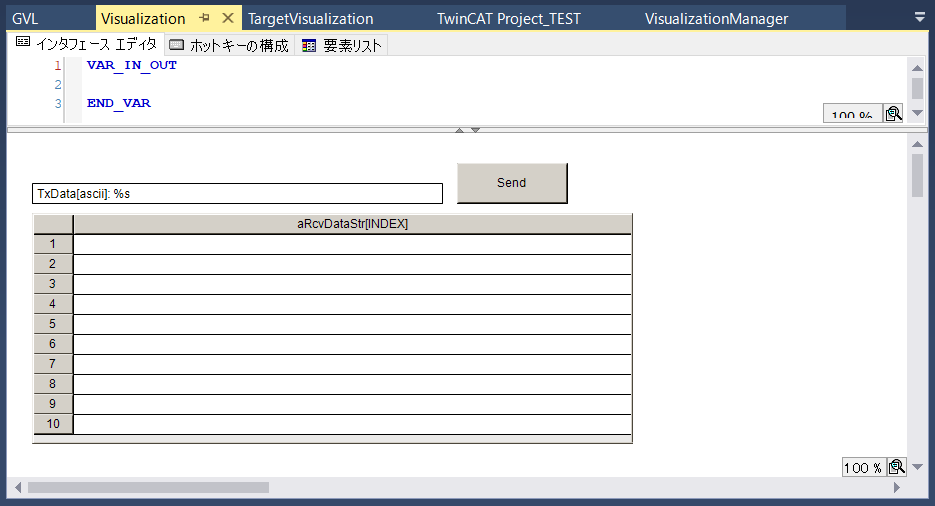
前回は、BECKHOFF機器のEL6021を使用したRS485通信機能に画面を付けてみました。下記のような画面を作成しました。
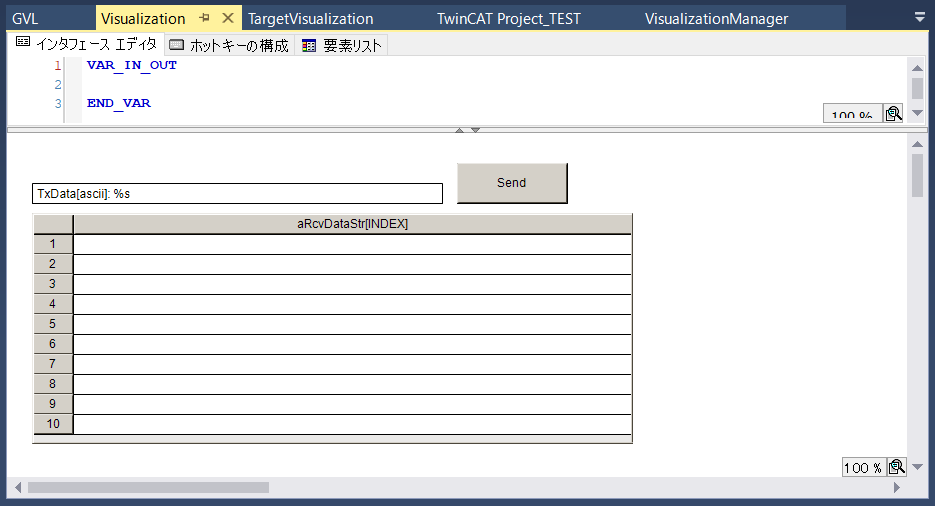
前回の内容は下記のリンクを参照してください。
前回は、PCのVisual Studioから動作させていることもあり、リアルタイム性はありません。今回は、C6015内でダイアログを表示させて、リアルタイム性をもたせたいと思います。
今回使用したBECKHOFFの機器とソフトウェア、開発環境は下記のとおりです。
【 ハードウェア 】
- C6015(IPC)
- EK1100(EtherCAT カプラ)
- EL1809(デジタルインプット)
- EL2809(デジタルアウトプット)
- EL6021(RS485通信)
【ソフトウェア】
- TC1200(TC3 PLC)
- TF6340(TC3 Serial Communication)
- TF1800(TC3 PLC HMI)
【開発環境】
- Visual Studio
それでは、作成していきたいと思います。前回のプロジェクトを使用して、C6015に表示させます。前回のプロジェクトは下記のリンクを参考にしていください。