今回は、CAN通信のファームウェアを作成してみたいと思います。使用するマイコンは、「RX66T」になります。「Renesas Starter Kit+ for RX66T」評価ボードを使用します。開発環境は「e2studio」です。
そもそもCANとは、Controller Area Networkの略称で、ISOにて国際的に標準化されたシリアル通信プロトコルです。1986年ドイツの伝送メーカBOSCH社で自動車向けの通信プロトコルとしてCANを開発しました。今日では、CANの高い性能と信頼性が認められ、用途は多方面にわたっています。
今回は、CAN通信による送信と受信に着目して、ファームウェアを作成します。実際は、エラー状態などの遷移など構築する必要があるのですが、今回はとうりあえず送信と受信のみの機能となります。
それでは、CAN通信のファームウェアを作成したいと思います。今回作成するファームウェアは下記のような仕様にしたいと思います。
- ファームウェアはデータを受信すると、受信したデータによって、「Renesas Starter Kit+ for RX66T」のLEDを点灯したり、消灯したりします。
- ファームウェアは「Renesas Starter Kit+ for RX66T」のスイッチを
押すと、データを送信します。
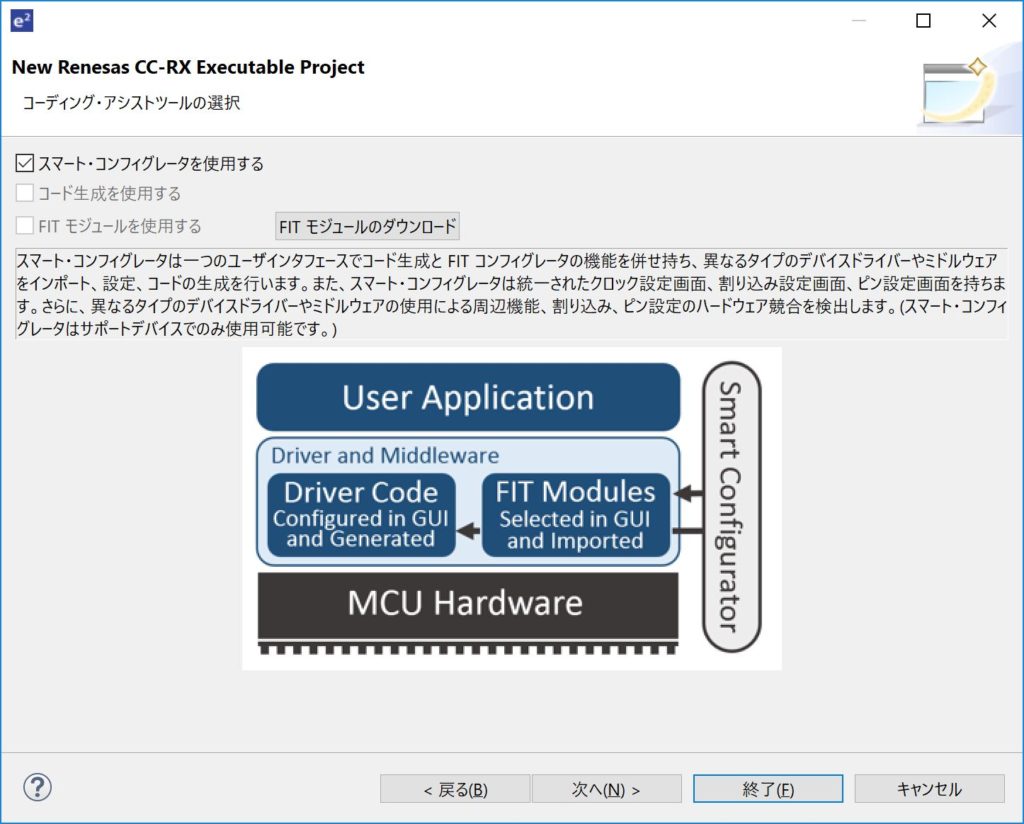
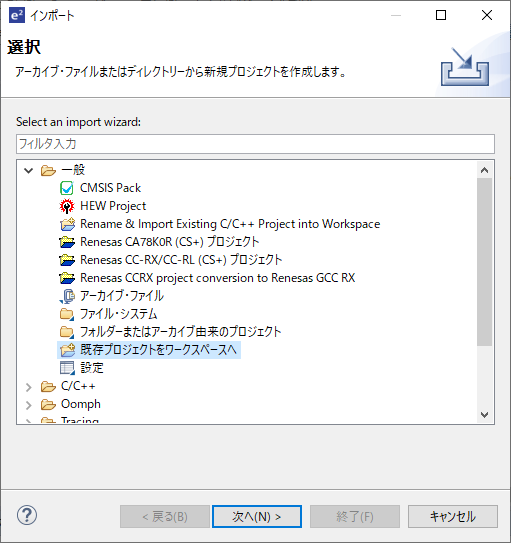
まずは、新規プロジェクトを作成します。新規プロジェクトの作成方法は、下記のページを参考にしてください。
RX(3)-RS232通信
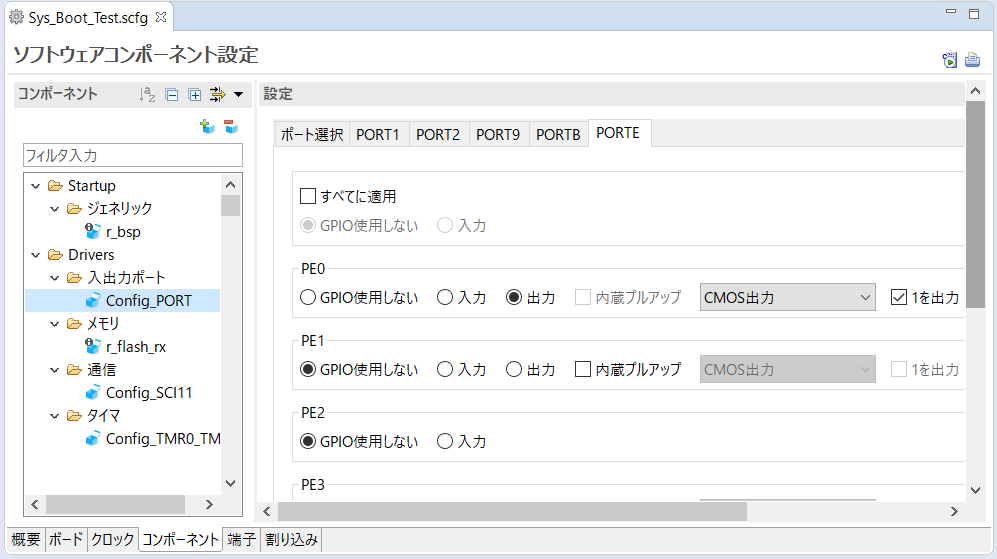
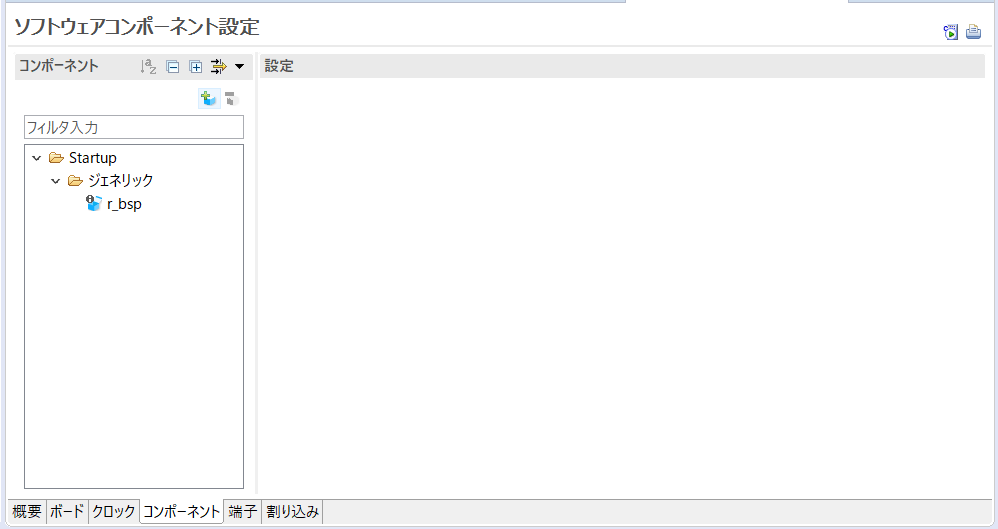
プロジェクト・エクスプローラーに新規プロジェクトが追加されました。中央には、スマート・コンフィグレータが開かれると思いますので、コンポーネントの追加をしていきます。