今回は、CAN通信を行えるアプリケーションを作成しようと思います。CANは、Controller Area Networkの略称で、ISOにて国際的に標準化されたシリアル通信プロトコルです。1986年ドイツの伝送メーカBOSCH社で自動車向けの通信プロトコルとしてCANを開発しました。今日では、CANの高い性能と信頼性が認められ、用途は多方面にわたっています。
CAN通信を行うために使用するハードウェアは、Peak System社製のPCAN-USBを使用しようと思います。Peak System社より、「PCAN-View」というアプリケーションも提供されているので、PCAN-USBと組み合わせて使用することで、CAN通信を行うこともできます。PCAN-Viewは下記サイトよりダウンロードできます。
https://www.peak-system.com/PCAN-USB.199.0.html?&L=1
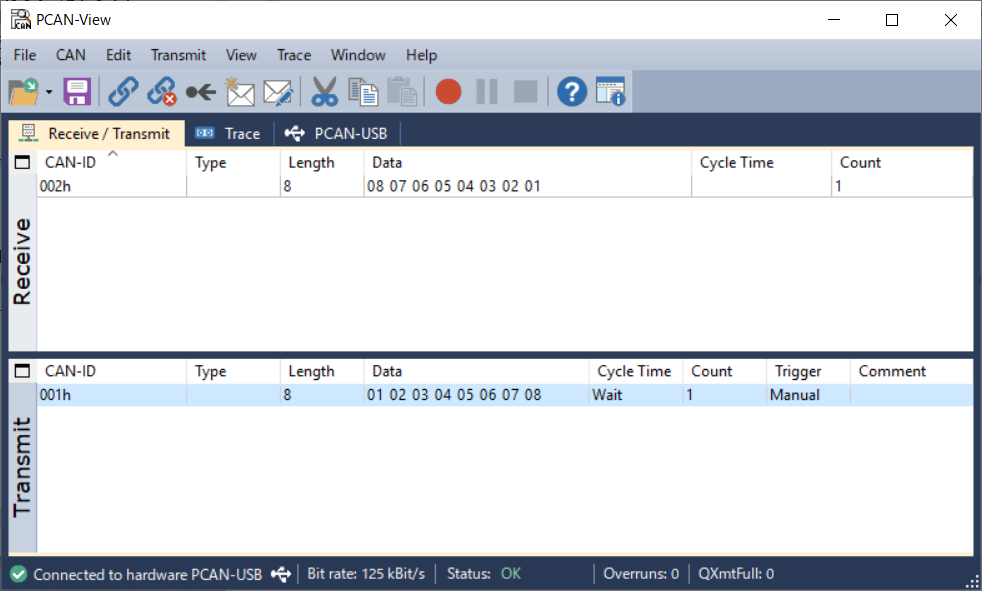
下記は、実際にCAN通信を行っているようすです。
PCAN-ViewでもCAN通信はできますが、今回は、C#を使用して、アプリケーションを作成したいと思います。開発環境は、Visual Studioになります。